您现在的位置是:首页 >要闻 > 2020-12-18 08:33:27 来源:
新机器人可以看到他们的未来
导读 加利福尼亚大学伯克利分校的研究人员开发了一种机器人学习技术,该技术使机器人能够想象他们的行动的未来,以便他们能够弄清楚如何操纵从未
加利福尼亚大学伯克利分校的研究人员开发了一种机器人学习技术,该技术使机器人能够想象他们的行动的未来,以便他们能够弄清楚如何操纵从未遇到过的物体。将来,这项技术可以帮助自动驾驶汽车预测未来的道路事件,并在家庭中生产出更多的智能机器人助手,但最初的原型着重于完全从自动驾驶中学习简单的手动技能。
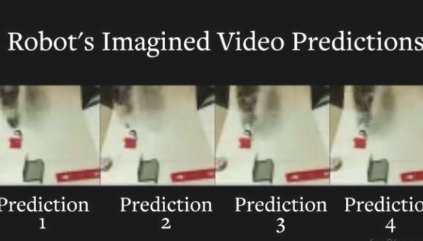
借助这种称为视觉预见的技术,机器人可以预测如果执行特定的动作序列,相机将看到的图像。到目前为止,这些机器人的想象力仍然相对简单-预测仅在未来几秒钟之内进行-但它们足以让机器人找出如何在桌子上四处移动物体而不会干扰障碍物。至关重要的是,该机器人可以学会执行这些任务,而无需任何人的帮助或有关物理学,其环境或物体是什么的先验知识。这是因为视觉想象力完全是从无人值守和无人监督的探索中完全从头开始学习的,其中机器人在桌子上玩耍。在这个游戏阶段之后,机器人将建立一个预测模型 并可以使用此模型来处理以前从未见过的新对象。
伯克利大学电气系助理教授谢尔盖·莱文(Sergey Levine)表示:“就像可以想象我们的动作将如何在环境中移动物体的方式一样,这种方法可以使机器人形象地观察不同的行为将如何影响周围的世界。工程与计算机科学,其实验室开发了该技术。“这可以在复杂的现实情况下智能规划高度灵活的技能。”
该研究小组将于12月5日在加利福尼亚州长滩举行的神经信息处理系统会议上演示视觉预见技术。
该系统的核心是基于卷积循环视频预测或动态神经对流(DNA)的深度学习技术。基于DNA的模型根据机器人的动作预测图像中的像素如何从一帧移动到下一帧。对此类模型的最新改进以及大大改进的计划功能,已使基于视频预测的机器人控制能够执行日益复杂的任务,例如在障碍物周围滑动玩具并重新放置多个对象。
")


")


")



")
")
")
")
")
")
")
")
")