您现在的位置是:首页 >要闻 > 2020-12-15 08:41:14 来源:
如何用灵巧的手解决魔方
导读 近年来,越来越多的研究人员探索使用机械臂或灵巧的手来解决各种日常任务。尽管它们中的许多已经成功地完成了诸如抓握或基本操纵之类的简单
近年来,越来越多的研究人员探索使用机械臂或灵巧的手来解决各种日常任务。尽管它们中的许多已经成功地完成了诸如抓握或基本操纵之类的简单任务,但到目前为止,涉及多个步骤以及精确/战略运动的复杂任务被证明更加难以解决。
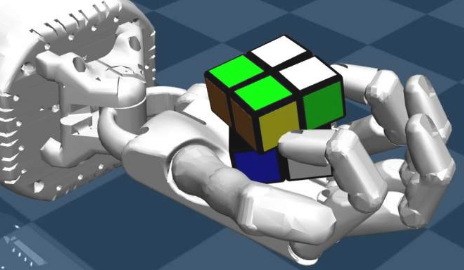
中文大学和腾讯AI实验室的一组研究人员最近开发了一种基于深度学习的方法,可以使用多指灵巧的手来解决魔方。他们的方法发表在arXiv上的一篇论文中,该方法使灵巧的手能够解决更高级的手动操作任务,例如著名的Rubik's Cube Puzzle。
魔方是一个覆盖有多个彩色正方形的塑料立方体,可以移动到不同的位置。拼图的目的是从战略上扭曲和旋转立方体的各个部分,直到其每个面上的所有正方形都具有相同的颜色。
“看到一些研究人员使用多指机器人手来完成诸如放置物体和操纵工具之类的任务,我们考虑了是否可以将机器人手用于更复杂的任务,例如解决魔方”,其中一位研究人员李廷光进行这项研究的人士告诉TechXplore。
为了用灵巧的手解决魔方魔方难题,李和他的同事们开发了一种分层的深度强化学习模型,该模型将任务分为计划阶段和操纵阶段。在他们的研究中,研究人员将这种方法应用于称为“影子手”的五指灵巧手。
“使用机械手解决魔方的挑战有两个方面:第一,控制机器人手具有很高的自由度,这非常困难;其次,解决魔方需要很长的运动序列。” 。“我们的想法结合了具有很多成功应用和人类知识的深度强化学习算法。目标是展示机器人手的灵巧性,并以高成功率解决随机扰乱的魔方。
研究人员提出的分层模型具有两个关键组成部分:一个用于计划,另一个用于操纵。最初,计划组件(即,基于模型的多维数据集求解器)标识用于解决难题的最佳模式序列。然后,操纵控制器(即,无模型的立方体运算符)控制灵巧手的手指以执行这些步骤。
")









")
")
")
")
")
")
")
")
")