新系统优化了遍历各种地形类型的机器人的形状
因此,您需要一个可以爬楼梯的机器人。那个机器人应该是什么形状?它应该像人一样有两条腿吗?还是六只,像一只蚂蚁?选择正确的形状对于您的机器人穿越特定地形的能力至关重要。而且,不可能构建和测试每种潜在的形式。但是现在,由MIT开发的系统可以对它们进行仿真,并确定哪种设计效果最好。
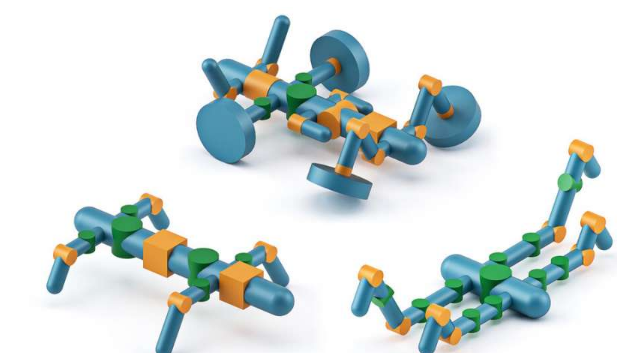
首先,告诉系统RoboGrammar,该系统在您的车间周围摆着哪些机器人零件(轮子,关节等)。您还告诉它机器人需要在什么地形上行驶。RoboGrammar负责其余的工作,为您的机器人生成优化的结构和控制程序。
这一进步可能会为该领域注入大量的计算机辅助创造力。该论文的主要作者,博士学位的艾伦·赵说:“机器人设计仍然是一个非常手工的过程。” 麻省理工学院计算机科学与人工智能实验室(CSAIL)的学生。他将RoboGrammar描述为“一种可能会更有效地提出新颖,更具创造性的机器人设计的方法”。
Zhao是该论文的主要作者,他将在本月的SIGGRAPH Asia会议上发表论文。合著者包括博士学位。学生Xu Xu,博士后MinaKonaković-Luković,博士后Josephine Hughes,博士。麻省理工学院的学生安德鲁·斯皮尔伯格(Andrew Spielberg)以及丹妮拉·鲁斯(Daniela Rus)和沃伊切奇·马图西克(Wojciech Matusik)教授。
Zhao表示,机器人是为完成各种任务而建造的,但是“它们的总体形状和设计往往非常相似”。他补充说,例如,“当您想到建造一个需要跨越各种地形的机器人时,您会立即跳到四足动物,”他指的是一条四足动物,就像一条狗。“我们想知道这是否真的是最佳设计。”
赵的团队推测,更多创新的设计可以改善功能。因此,他们为任务建立了一个计算机模型-该系统不会受到先前约定的不当影响。尽管创造力是目标,但赵的确必须制定一些基本规则。
Zhao在论文中写道,可能的机器人形式的宇宙“主要由荒谬的设计组成”。他说:“如果您只能以任意方式连接部件,那么您将陷入混乱。” 为了避免这种情况,他的团队开发了“图形语法”,这是对机器人组件布置的一组约束。例如,相邻的腿段应该与关节相连,而不是与另一个腿段相连。此类规则确保至少在基本级别上每个计算机生成的设计作品。
赵说,他的图形语法规则不是受其他机器人的启发,而是受到动物(尤其是节肢动物)的启发。这些无脊椎动物包括昆虫,蜘蛛和龙虾。作为一个整体,节肢动物是一个成功的进化故事,占已知动物物种的80%以上。“它们的特点是中央主体具有可变数量的节段。某些节段可能附有腿,”赵说。“而且我们注意到,这不仅足以描述节肢动物,还可以描述更熟悉的形式,”包括四足动物。赵采用节肢动物启发的规则部分是由于这种灵活性,尽管他确实增加了一些机械上的繁荣。例如,他允许计算机使轮子变形而不是腿变形。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
试驾极狐阿尔法S(ARCFOX αS)是一次令人印象深刻的体验。从咨询开始,品牌的专业客服迅速回应了我的疑问,...浏览全文>>
-
如果您想预约哈弗猛龙的试驾体验,可以按照以下步骤快速在4S店完成预约:首先,您可以通过哈弗汽车的官方网站...浏览全文>>
-
如果您想体验零跑汽车的试驾服务,可以通过以下步骤在4S店快速预约:首先,访问零跑汽车的官方网站或通过其官...浏览全文>>
-
试驾奔驰迈巴赫S级的预约流程简单清晰,以下是具体步骤:首先,访问奔驰官方网站或联系当地授权经销商。在网站...浏览全文>>
-
纳米01试驾流程通常包括以下几个步骤:第一步:预约试驾用户可以通过品牌官网、4S店或电话预约试驾。提前预约...浏览全文>>
-
奔腾B70是一款集时尚设计与卓越性能于一身的中型轿车,近期有幸对其进行了一次深度试驾。这款车型不仅外观大气...浏览全文>>
-
想要快速预约福特蒙迪欧的试驾体验驾驶乐趣?以下是一些简单步骤帮助您轻松完成:首先,访问福特官网或通过福...浏览全文>>
-
大众试驾,轻松搞定试驾想要深入了解一款车的性能与驾驶感受?试驾是最佳选择!无论是追求操控感的运动型轿车...浏览全文>>
-
试驾现代胜达时,您需要满足一些基本条件以确保安全和顺利的体验。首先,您必须持有有效的驾驶证,并且驾龄通...浏览全文>>
-
小鹏G7是一款备受关注的智能电动车,对于新手来说,试驾前需要了解一些关键步骤和注意事项,确保安全且充分体...浏览全文>>
- 哈弗猛龙预约试驾,如何在4S店快速预约?
- 零跑汽车试驾,如何在4S店快速预约?
- 江淮iEV7试驾预约预约流程
- 试驾MG4 EV全攻略
- 奥迪SQ5 Sportback预约试驾,线上+线下操作指南
- 全顺试驾预约,一键搞定,开启豪华驾驶之旅
- 魏牌预约试驾全攻略
- 试驾零跑汽车零跑C01,畅享豪华驾乘,体验卓越性能
- 试驾哈弗H6操作指南
- 零跑T03试驾,畅享豪华驾乘,体验卓越性能
- 菱势汽车预约试驾,轻松搞定试驾流程
- MINI试驾,线上+线下操作指南
- 试驾沃尔沃XC60,从预约到试驾的完美旅程
- 试驾QQ多米,畅享豪华驾乘,体验卓越性能
- 试驾丰田汉兰达,一键搞定,开启豪华驾驶之旅
- 力帆预约试驾,一键搞定,开启豪华驾驶之旅
- 阿维塔12预约试驾,4S店体验全攻略
- 试驾江铃E路顺V6,简单几步,开启完美试驾之旅
- 灵悉L试驾预约,如何享受4S店的专业服务?
- 极氪7X试驾,如何享受4S店的专业服务?