您现在的位置是:首页 >人工智能 > 2022-05-26 16:26:47 来源:
微型机器人螃蟹是有史以来最小的遥控步行机器人
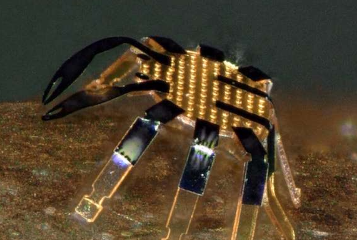
西北大学的工程师已经开发出有史以来最小的遥控步行机器人——它以一种小巧可爱的躲猫猫的形式出现。小螃蟹只有半毫米宽,可以弯曲、扭曲、爬行、行走、转身甚至跳跃。研究人员还开发了毫米大小的机器人,类似于尺蠖、蟋蟀和甲虫。尽管目前这项研究是探索性的,但研究人员认为,他们的技术可能会使该领域更接近于实现能够在狭窄空间内执行实际任务的微型机器人。
该研究将于周三(5月25日)发表在《科学机器人》杂志上。去年9月,同一个团队推出了一种带翼微芯片,这是有史以来最小的人造飞行结构。
“机器人学是一个令人兴奋的研究领域,微型机器人的发展是学术探索的一个有趣话题,”领导这项实验工作的JohnA.Rogers说。“您可能会将微型机器人想象为修复或组装工业中小型结构或机器的代理,或者作为手术助手来清除阻塞的动脉、止血或消除癌性肿瘤——所有这些都是微创手术。”
“我们的技术可以实现多种受控运动方式,并且可以以每秒一半的身体长度的平均速度行走,”领导理论工作的黄永刚补充道。“对于陆地机器人来说,要在如此小的规模上实现这一点非常具有挑战性。”
螃蟹比跳蚤还小,它不是由复杂的硬件、液压或电力驱动的。相反,它的力量在于它身体的弹性。为了构建机器人,研究人员使用了一种形状记忆合金材料,这种材料在加热时会转变为“记忆”的形状。在这种情况下,研究人员使用扫描的激光束在机器人身体的不同目标位置快速加热。一层薄薄的玻璃涂层在冷却时弹性地使相应的结构部分恢复到其变形的形状。
随着机器人从一个阶段变为另一个阶段——变形为记忆形状并再次变回——它会产生运动。激光不仅远程控制机器人启动,激光扫描方向也决定了机器人的行走方向。例如,从左向右扫描会导致机器人从右向左移动。
“因为这些结构非常小,冷却速度非常快,”罗杰斯解释说。“事实上,缩小这些机器人的尺寸可以让它们跑得更快。”
为了制造这么小的小动物,罗杰斯和黄转向了他们八年前引入的一种技术——一种受儿童弹出式书籍启发的弹出式组装方法。
首先,该团队以平坦的平面几何形状制造了行走蟹结构的前身。然后,他们将这些前体粘合到略微拉伸的橡胶基材上。当拉伸的基材松弛时,会发生受控的屈曲过程,导致螃蟹“弹出”成精确定义的三维形状。
通过这种制造方法,西北大学的团队可以开发出各种形状和大小的机器人。那么为什么是一只躲猫猫呢?我们要感谢Rogers和Huang的学生。
“通过这些组装技术和材料概念,我们可以制造几乎任何尺寸或3D形状的步行机器人,”罗杰斯说。“但学生们对小螃蟹的侧身爬行动作感到鼓舞和逗乐。这是一种创造性的奇思妙想。”
")


")


")



")
")
")
")
")
")
")
")
")