您现在的位置是:首页 >人工智能 > 2021-04-28 00:03:11 来源:
机器人可以在几分钟内自动恢复损坏
有朝一日,机器人将为社会提供巨大的利益,例如在搜救任务和扑救森林火灾中 - 但直到他们能够学会在受到损害时继续工作。
“ 自然 ” 杂志上发表的一篇名为“能够像动物一样适应的机器人” 的新论文展示了如何让机器人在不到两分钟的时间内自动恢复受伤。
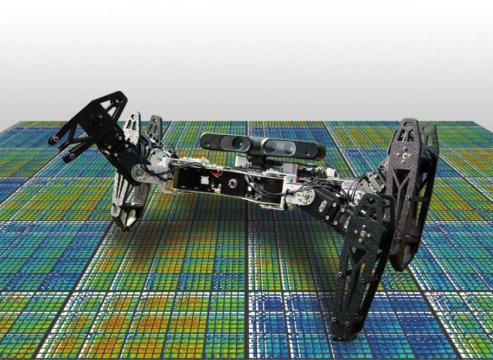
该作品的视频显示了一个六足机器人,即使两条腿断了也能适应继续行走。它还显示了一个机器人手臂,它学会了如何正确放置一个物体,即使有几个损坏的电机。
来自法国皮埃尔和玛丽居里大学的Antoine Cully和Jean-Baptiste Mouret与Jeff Clune(怀俄明大学)和Danesh Tarapore(皮埃尔和玛丽居里大学)合作领导了这项工作。
与今天的机器人相比,动物表现出惊人的适应伤害的能力。例如,有很多三条腿的狗可以捕捉飞盘,如果你的脚踝被扭伤,你很快就会找到一条走路,尽管受伤了。科学家从这些生物学策略中汲取灵感。
“受伤时,动物不会从头开始学习,”资深作家让 - 巴蒂斯特·穆雷说。“相反,他们对不同的行为方式有直觉。这些直觉允许他们智能地选择一些不同的行为进行尝试,并且在这些测试之后,他们选择一种尽管受伤但仍可以工作的机器人。我们制造了可以做的机器人相同。”
在部署之前,机器人使用自身的计算机模拟来创建高性能行为空间的详细地图。该图表示机器人对其可以执行的不同行为及其预测值的“直觉”。如果机器人受损,它会使用这些直觉来指导学习算法,该算法进行实验以快速发现尽管受到损害仍然有效的补偿行为。新算法称为“智能试验和错误”。
“一旦受损,机器人就像一个科学家,”主要作者Antoine Cully解释道。“它对可能有效的不同行为有先前的期望,并开始测试它们。但是,这些预测来自模拟的,未损坏的机器人。它必须找出它们中的哪些工作,不仅在现实中,而且还有损坏。
“它尝试的每个行为就像一个实验,如果一个行为不起作用,那么机器人就足够聪明,可以排除整个行为类型并尝试一种新类型,”Cully继续道。“例如,如果走路,主要是在后腿上,不能很好地行走,接下来会尝试在前腿上行走。令人惊讶的是,它能以多快的速度学习一种新的行走方式。观看机器人走路真是太棒了从大约两分钟的残疾和鞭打到有效跛行。“
相同的智能试验和错误算法允许机器人适应不可预见的情况,包括适应新环境和发明新行为。
Jeff Clune解释说,“从技术上讲,智能试验和错误涉及两个步骤:(1)创建行为 - 性能图,(2)适应不可预见的情况。”
第一步中的地图是使用一种称为MAP-Elites的新型进化算法创建的。进化算法通过在计算机模拟中举办“适者生存”竞赛来模拟达尔文进化,以演化人工智能机器人。第二步中的自适应涉及“贝叶斯优化”算法,该算法利用由地图提供的先验知识来有效地搜索尽管有损坏但仍然有效的行为。
“我们进行的实验表明,智能试验和错误的最重要组成部分是创建和利用地图中包含的先验知识,”Clune说。
这项新技术将有助于开发更强大,更有效的自主机器人。Danesh Tarapore提供了一些例子。
“它可以创造机器人,可以帮助救援人员,而不需要他们的持续关注,”他说。“这也使得创建个人机器人助手变得更加容易,即使部件坏了也可以继续提供帮助。”
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")