下一代机器人蟑螂可以探索水下环境
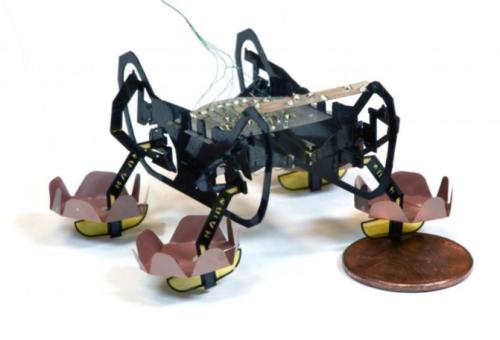
在自然界中,蟑螂可以在水下存活长达30分钟。现在,机器人蟑螂可以做得更好。哈佛的Ambulatory Microrobot,被称为HAMR,可以在陆地上行走,在水面上游泳,并在必要时在水下行走,为这个小机器人开辟新的环境进行探索。
下一代HAMR使用多功能脚垫,当HAMR需要游泳时,它依赖于表面张力和表面张力引起的浮力,但当HAMR需要下沉时也可以施加电压来破坏水面。该过程称为电润湿,其是在施加的电压下材料与水表面之间的接触角的减小。接触角的这种变化使物体更容易破坏水面。
在水面上移动允许微型机器人逃避淹没的障碍物并减少阻力。使用四对不对称襟翼和定制设计的游泳步态,HAMR机载桨在水面上游泳。受到潜水甲虫步态的启发,研究人员利用机器人被动襟翼与周围水之间的不稳定相互作用,有效地向前游动和转向。
“这项研究表明,微型机器人可以利用小规模物理 - 在这种情况下是表面张力 - 来执行对大型机器人具有挑战性的功能和能力,”哈佛John A.博士后研究员Kevin Chen博士说。保尔森工程与应用科学学院(SEAS)和该论文的第一作者。
HAMR的规模是其表现的关键,”SEAS的研究生,该论文的共同作者Neel Doshi说。“如果它更大,那么支持具有表面张力的机器人将是具有挑战性的,如果它更小,机器人将需要更多的力来打破它。”
HAMR重1.65克(大约和一个大的回形针一样多),可以携带1.44克的额外有效载荷而不会下沉,并且可以以高达10赫兹的频率划桨它的腿。它涂在Parylene上,以防止它在水下短路。
一旦低于水面,HAMR使用相同的步态,就像在干地上行走一样,并且同样具有移动性。然而,离开水面是一项巨大的挑战。水的表面张力是HAMR重量的两倍,感应扭矩会导致机器人后腿摩擦力的急剧增加。研究人员加强了机器人的传动,并在机器人的前腿上安装了软垫,以增加有效载荷,并在攀爬过程中重新分配摩擦力。最后,沿着适度的斜坡行走,机器人能够突破水的状态。
一旦低于水面,HAMR使用相同的步态,就像在干地上行走一样,并且同样具有移动性。然而,离开水面是一项巨大的挑战。水的表面张力是HAMR重量的两倍,感应扭矩会导致机器人后腿摩擦力的急剧增加。研究人员加强了机器人的传动,并在机器人的前腿上安装了软垫,以增加有效载荷,并在攀爬过程中重新分配摩擦力。最后,沿着适度的斜坡行走,机器人能够突破水的状态。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
试驾极狐阿尔法S(ARCFOX αS)是一次令人印象深刻的体验。从咨询开始,品牌的专业客服迅速回应了我的疑问,...浏览全文>>
-
如果您想预约哈弗猛龙的试驾体验,可以按照以下步骤快速在4S店完成预约:首先,您可以通过哈弗汽车的官方网站...浏览全文>>
-
如果您想体验零跑汽车的试驾服务,可以通过以下步骤在4S店快速预约:首先,访问零跑汽车的官方网站或通过其官...浏览全文>>
-
试驾奔驰迈巴赫S级的预约流程简单清晰,以下是具体步骤:首先,访问奔驰官方网站或联系当地授权经销商。在网站...浏览全文>>
-
纳米01试驾流程通常包括以下几个步骤:第一步:预约试驾用户可以通过品牌官网、4S店或电话预约试驾。提前预约...浏览全文>>
-
奔腾B70是一款集时尚设计与卓越性能于一身的中型轿车,近期有幸对其进行了一次深度试驾。这款车型不仅外观大气...浏览全文>>
-
想要快速预约福特蒙迪欧的试驾体验驾驶乐趣?以下是一些简单步骤帮助您轻松完成:首先,访问福特官网或通过福...浏览全文>>
-
大众试驾,轻松搞定试驾想要深入了解一款车的性能与驾驶感受?试驾是最佳选择!无论是追求操控感的运动型轿车...浏览全文>>
-
试驾现代胜达时,您需要满足一些基本条件以确保安全和顺利的体验。首先,您必须持有有效的驾驶证,并且驾龄通...浏览全文>>
-
小鹏G7是一款备受关注的智能电动车,对于新手来说,试驾前需要了解一些关键步骤和注意事项,确保安全且充分体...浏览全文>>
- 哈弗猛龙预约试驾,如何在4S店快速预约?
- 零跑汽车试驾,如何在4S店快速预约?
- 江淮iEV7试驾预约预约流程
- 试驾MG4 EV全攻略
- 奥迪SQ5 Sportback预约试驾,线上+线下操作指南
- 全顺试驾预约,一键搞定,开启豪华驾驶之旅
- 魏牌预约试驾全攻略
- 试驾零跑汽车零跑C01,畅享豪华驾乘,体验卓越性能
- 试驾哈弗H6操作指南
- 零跑T03试驾,畅享豪华驾乘,体验卓越性能
- 菱势汽车预约试驾,轻松搞定试驾流程
- MINI试驾,线上+线下操作指南
- 试驾沃尔沃XC60,从预约到试驾的完美旅程
- 试驾QQ多米,畅享豪华驾乘,体验卓越性能
- 试驾丰田汉兰达,一键搞定,开启豪华驾驶之旅
- 力帆预约试驾,一键搞定,开启豪华驾驶之旅
- 阿维塔12预约试驾,4S店体验全攻略
- 试驾江铃E路顺V6,简单几步,开启完美试驾之旅
- 灵悉L试驾预约,如何享受4S店的专业服务?
- 极氪7X试驾,如何享受4S店的专业服务?