首页 >> 要闻 >
通过模仿蟑螂的头部来教机器人爬墙
通过模仿蟑螂的头部来教机器人爬墙
来自加利福尼亚大学,哈佛大学和宾夕法尼亚州立大学的一组研究人员发现了一种简单的方法,可以让机器人撞墙时改变飞机的位置(以蟑螂为例),它只是将墙壁的物理形状撞在墙上使它开始向上攀爬。研究人员在“皇家学会接口杂志”上发表了他们的机器人设计论文。
为了在现实世界中自行操作,机器人具有计算机头脑和许多代码,但是有时,研究人员用这种新的努力发现,更容易采用更简单的方法。在蟑螂没有做当它在地板上skittering并符合墙壁它只是猛地头扎入墙,它身体的形状带有其头部和上身向上,而它的腿不停搅动很多思考。这种方法允许蟑螂无需处理即可更换飞机,并且可以一直沿墙运行。它发生的时间很短,仅需75毫秒。
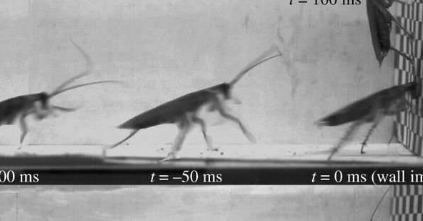
在设计能够爬墙的机器人时,必须考虑从地板到墙壁的过渡-如果分解成多个步骤,则该过程可能会花费硬件和大量代码。但是研究人员想知道他们是否可以设计出一种蟑螂形状的机器人,该机器人可以先撞入墙壁。为了找到答案,他们在实验室拍摄了蟑螂,撞到墙壁上然后向上爬,然后着手设计一个模仿他们发现的机器人。他们决定采用简单的盒形设计-一种小型,轻巧的机器人,适合手掌,它具有锥形鼻子和六个腿,无论发生什么情况都可以不断向前推进。他们进行了几次试验,以微调他们的创作,然后拍摄结果。这是一个非常简单的机器人,可以从水平姿势转变为机器人,
这个小机器人还不能爬墙,但是无需额外的硬件或软件即可完成过渡,这是该过程中至关重要的一步。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
分享:
相关阅读
最新文章
-
试驾极狐阿尔法S(ARCFOX αS)是一次令人印象深刻的体验。从咨询开始,品牌的专业客服迅速回应了我的疑问,...浏览全文>>
-
如果您想预约哈弗猛龙的试驾体验,可以按照以下步骤快速在4S店完成预约:首先,您可以通过哈弗汽车的官方网站...浏览全文>>
-
如果您想体验零跑汽车的试驾服务,可以通过以下步骤在4S店快速预约:首先,访问零跑汽车的官方网站或通过其官...浏览全文>>
-
试驾奔驰迈巴赫S级的预约流程简单清晰,以下是具体步骤:首先,访问奔驰官方网站或联系当地授权经销商。在网站...浏览全文>>
-
纳米01试驾流程通常包括以下几个步骤:第一步:预约试驾用户可以通过品牌官网、4S店或电话预约试驾。提前预约...浏览全文>>
-
奔腾B70是一款集时尚设计与卓越性能于一身的中型轿车,近期有幸对其进行了一次深度试驾。这款车型不仅外观大气...浏览全文>>
-
想要快速预约福特蒙迪欧的试驾体验驾驶乐趣?以下是一些简单步骤帮助您轻松完成:首先,访问福特官网或通过福...浏览全文>>
-
大众试驾,轻松搞定试驾想要深入了解一款车的性能与驾驶感受?试驾是最佳选择!无论是追求操控感的运动型轿车...浏览全文>>
-
试驾现代胜达时,您需要满足一些基本条件以确保安全和顺利的体验。首先,您必须持有有效的驾驶证,并且驾龄通...浏览全文>>
-
小鹏G7是一款备受关注的智能电动车,对于新手来说,试驾前需要了解一些关键步骤和注意事项,确保安全且充分体...浏览全文>>
大家爱看
频道推荐
站长推荐
- 哈弗猛龙预约试驾,如何在4S店快速预约?
- 零跑汽车试驾,如何在4S店快速预约?
- 江淮iEV7试驾预约预约流程
- 试驾MG4 EV全攻略
- 奥迪SQ5 Sportback预约试驾,线上+线下操作指南
- 全顺试驾预约,一键搞定,开启豪华驾驶之旅
- 魏牌预约试驾全攻略
- 试驾零跑汽车零跑C01,畅享豪华驾乘,体验卓越性能
- 试驾哈弗H6操作指南
- 零跑T03试驾,畅享豪华驾乘,体验卓越性能
- 菱势汽车预约试驾,轻松搞定试驾流程
- MINI试驾,线上+线下操作指南
- 试驾沃尔沃XC60,从预约到试驾的完美旅程
- 试驾QQ多米,畅享豪华驾乘,体验卓越性能
- 试驾丰田汉兰达,一键搞定,开启豪华驾驶之旅
- 力帆预约试驾,一键搞定,开启豪华驾驶之旅
- 阿维塔12预约试驾,4S店体验全攻略
- 试驾江铃E路顺V6,简单几步,开启完美试驾之旅
- 灵悉L试驾预约,如何享受4S店的专业服务?
- 极氪7X试驾,如何享受4S店的专业服务?