您现在的位置是:首页 >要闻 > 2020-12-17 08:43:12 来源:
RoboTurk机器人模仿学习的众包平台
模仿学习是机器学习的一个分支,可以训练机器模仿人类的行为,同时完成特定的任务。这些技术解决了强化学习的一些缺点,例如探索和奖励规范,在机器人技术领域显示出巨大的希望。
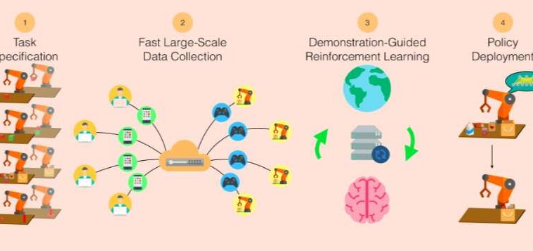
尽管取得了令人鼓舞的结果,但由于难以使用现有方法收集大量任务演示,因此模仿学习研究迄今仅限于中等规模的数据集。为了解决这些局限性,由斯坦福大学的Silvio Savarese博士和Lii-Fei Li博士督导的一组研究人员开发了RoboTurk,RoboTurk是一个众包平台,可使用广泛使用的智能手机设备进行基于6自由度轨迹的高质量远程操作。
进行这项研究的研究人员之一阿杰·曼德卡尔(Ajay Mandlekar)告诉TechXplore:“我们想为机器人技术创建像ImageNet这样的东西。” “我们认为数据是机器人学习领域的关键限制。尽管有很多方法可以从数据中学习,例如数据驱动的控制和强化学习,但大多数方法都是收集自己的数据。因此,数据通常是低质量的,例如导致机器人随机移动手臂。这种探索可能既困难又不安全,但我们相信人类可以提供帮助。”
ImageNet是由李博士创建的著名图像数据库,通常用于计算机视觉和对象识别研究。由斯坦福视觉与学习实验室开发的众包平台旨在用作机器人技术和模仿学习研究的类似资源。
“与ImageNet不同,这样的数据收集系统必须是动态的,允许我们重复地,经常地按需收集数据,甚至可以使用协作学习来收集数据,”也参与了Roboturk开发的朱克(Yuke Zhu)告诉TechXplore。“这是因为收集的数据取决于机器人在环境中采取的动作类型。”
研究人员的最终目标是对机器人进行高级操作技能的培训,使他们能够在工业环境中完成包装或组装等任务。他们发现,尽管模仿学习在这种情况下显示出巨大的潜力,但由于难以收集大量任务演示,现有的数据集非常有限。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")